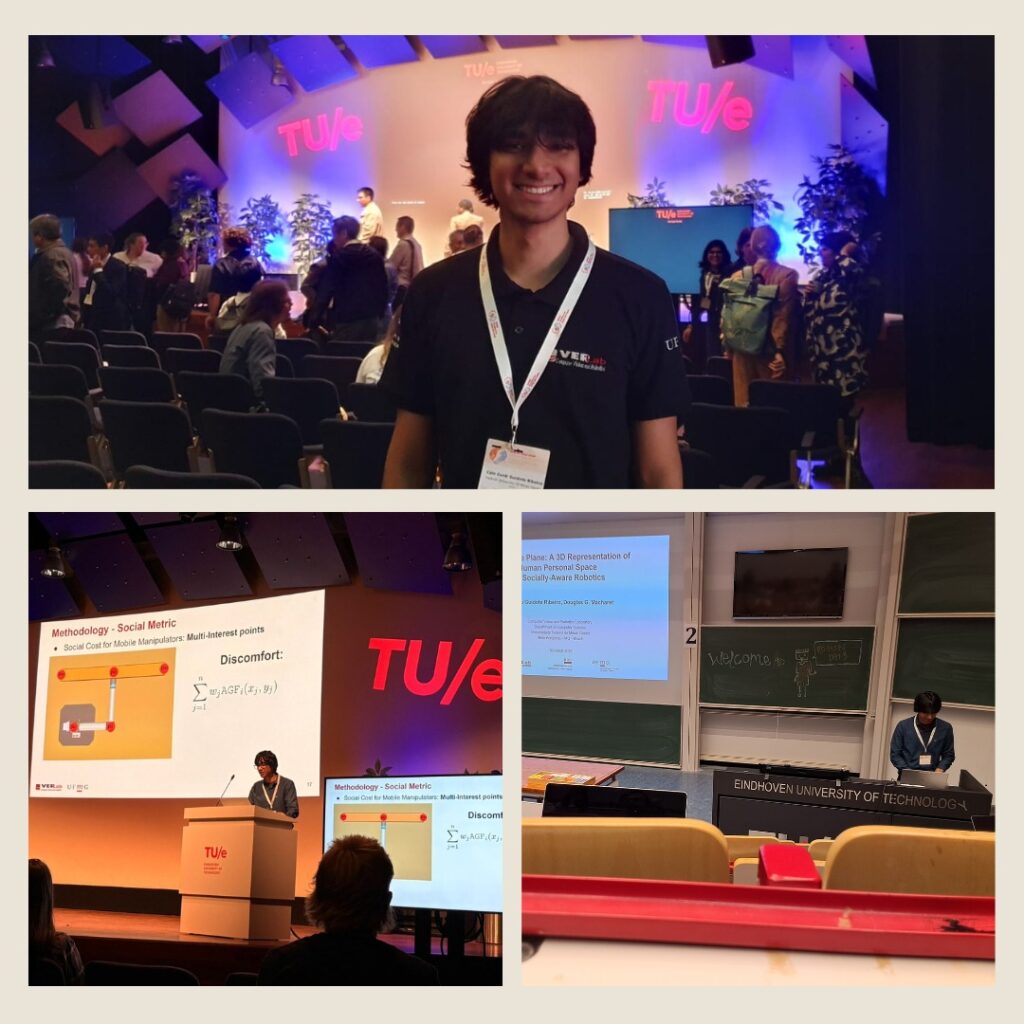
O aluno de mestrado do Programa de Pós-graduação em Ciência da Computação (PPGCC) da UFMG, Caio Conti Guidote Ribeiro, sob orientação do professor do Departamento de Ciência da Computação (DCC),Douglas Guimarães Macharet, apresentou dois artigos inovadores na IEEE RO-MAN 2025 — uma das principais conferências internacionais na área de Interação Humano-Robô (IHR). O evento foi realizado no campus da Universidade de Tecnologia de Eindhoven, nos Países Baixos, reunindo pesquisadores e profissionais de todo o mundo para discutir os mais recentes avanços no campo.
Reconhecida como um fórum de referência global, a IEEE RO-MAN promove o intercâmbio de ideias sobre os desafios e soluções na convivência entre humanos e robôs. A edição de 2025 abrangeu uma ampla gama de temas, incluindo teorias, metodologias, tecnologias e estudos experimentais voltados para tornar a interação humano-robô mais natural, segura e eficiente.
O primeiro trabalho apresentado por Caio, intitulado “Beyond the Plane: A 3D Representation of Human Personal Space for Socially-Aware Robotics”, propõe uma nova abordagem para representar o espaço pessoal humano em três dimensões. A pesquisa visa aprimorar a consciência social dos robôs, permitindo que eles compreendam e respeitem o espaço individual das pessoas ao seu redor.
A principal inovação do estudo está na modelagem tridimensional do espaço social, superando as abordagens tradicionais que consideram apenas dois planos (horizontal e vertical). Segundo Caio, essa nova perspectiva pode transformar a forma como robôs interagem com seres humanos em ambientes compartilhados, evitando comportamentos invasivos e promovendo uma convivência mais harmônica.
Já o segundo artigo, “Socially-Aware Object Transportation by a Mobile Manipulator in Static Planar Environments with Obstacles”, foi desenvolvido em coautoria com o aluno de Iniciação Científica do DCC, Leonardo Paes. O trabalho apresenta uma metodologia voltada para o uso de manipuladores móveis em ambientes sociais, com foco na realização de tarefas de transporte de objetos de forma eficiente e socialmente consciente.
A pesquisa considera a presença de obstáculos e a interação com pessoas e objetos no ambiente, buscando otimizar o desempenho dos robôs manipuladores e reduzir os riscos de colisões. A proposta também inclui mecanismos para que os robôs ajustem suas trajetórias e comportamentos com base na movimentação das pessoas ao redor, promovendo uma interação mais fluida, segura e adaptável.